任务使命
行星探路者创新实践项目学生主导的地外探测车系统创新实践。 团队研发能够在月球与火星表面自主行驶、避障和规划路线的智能探测车。
融合物理学、电子工程、计算机科学多学科知识, 为学生提供跨学科的科研实践平台,探索行星科学前沿。
CORE TASKS
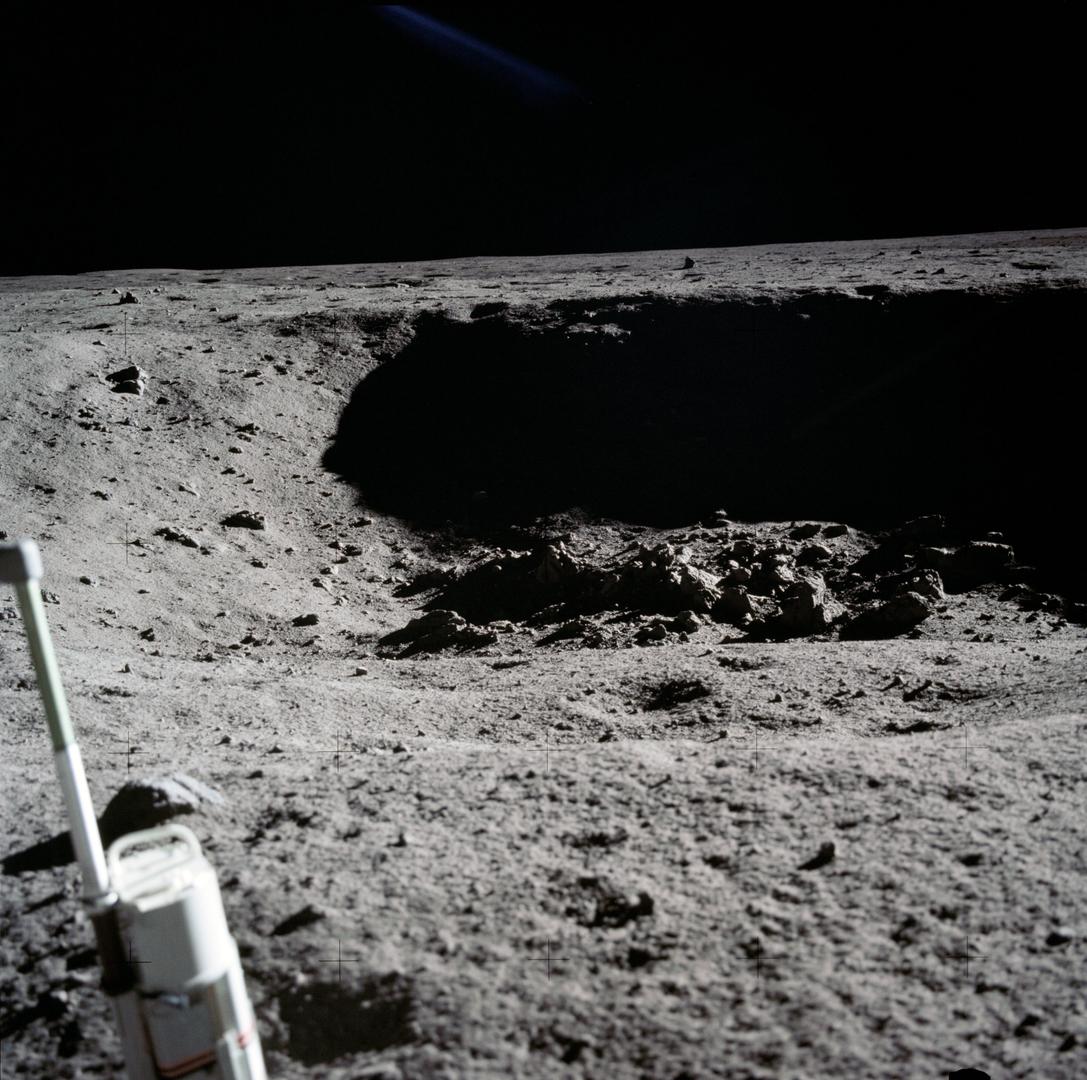
- 月球车自主导航系统研发
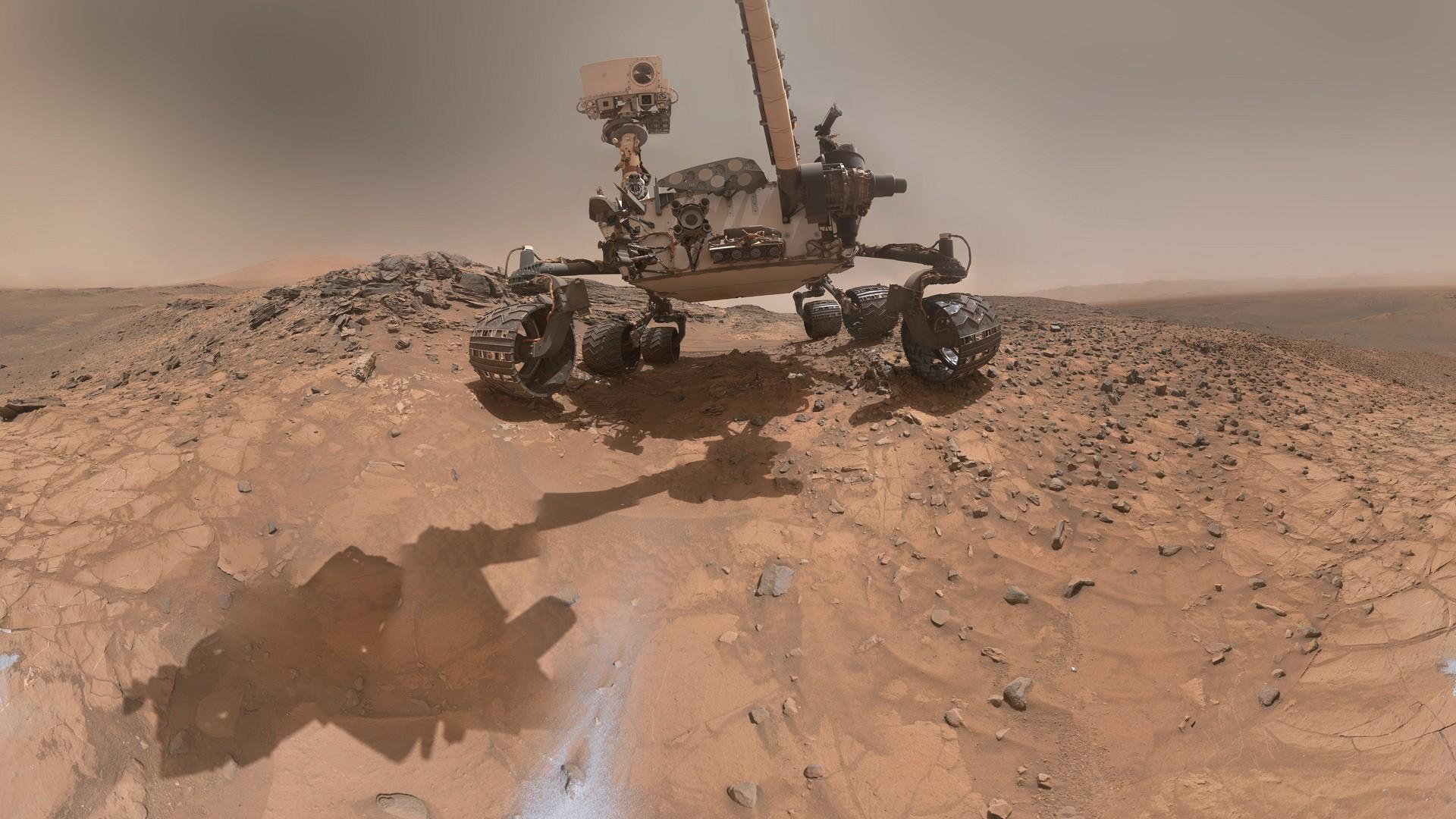
- 火星车环境感知与路径规划
- 探测载荷集成与野外科学观测
行星车自主导航与探测创新实践
行星探路者创新实践项目学生主导的地外探测车系统创新实践。 团队研发能够在月球与火星表面自主行驶、避障和规划路线的智能探测车。
融合物理学、电子工程、计算机科学多学科知识, 为学生提供跨学科的科研实践平台,探索行星科学前沿。
项目准备
理论讲授
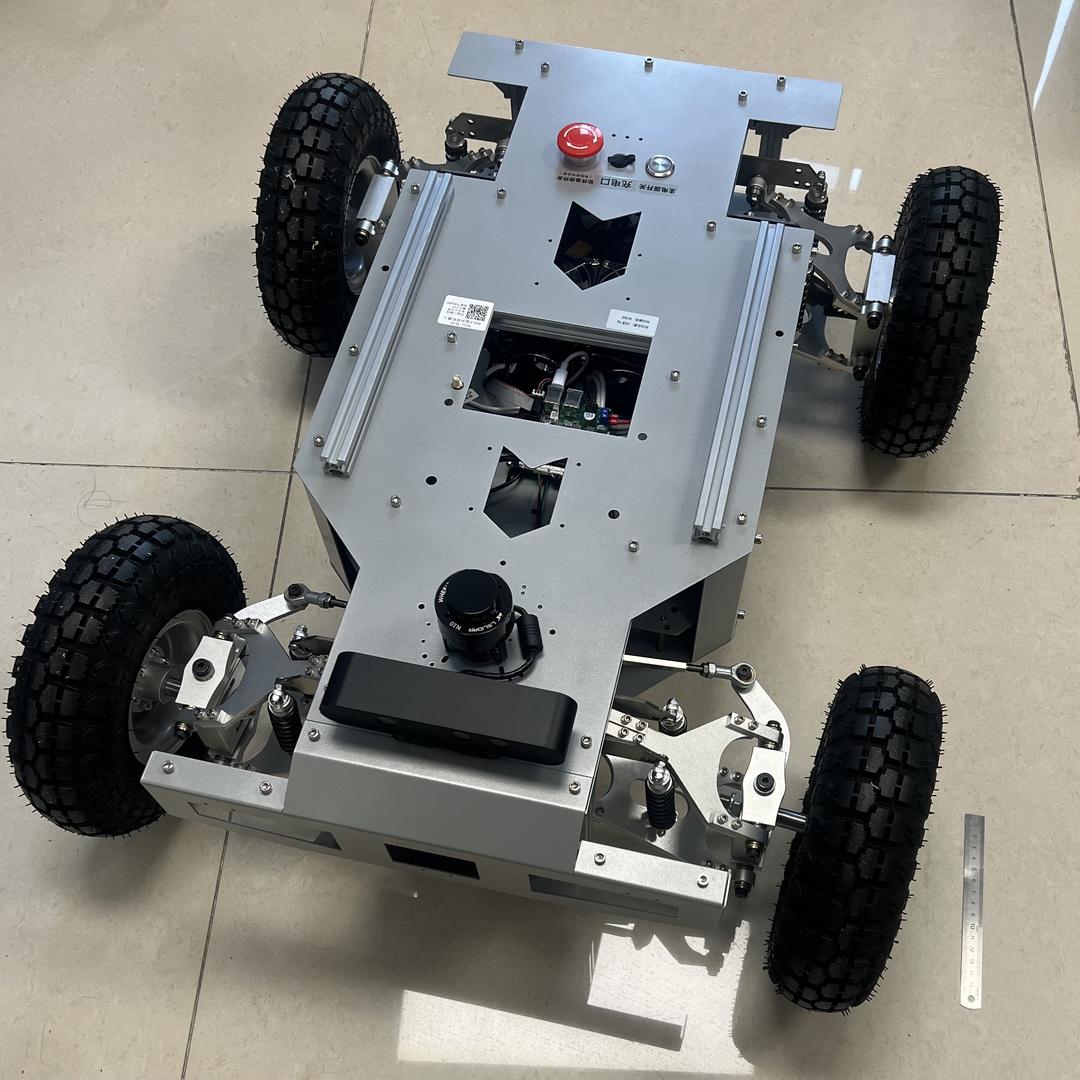
硬件研制
软件开发
IN PROGRESS校内测试
野外实践
本项目由博士生开宇负责日常运营与协调,面向全校招收对行星探测有热情的本科生和研究生。学术导师封常青教授(个人主页)提供指导,研究方向涵盖核探测与核电子学、微弱信号探测、基于 FPGA 的机器学习与信息技术等领域。
行星表面没有 GPS、没有公路、没有救援。
从月球到火星,一切探索都始于一台能够自主思考的机器。
地火通信单程延迟 4–24 分钟,火星车收到的指令已是"过去式"。每一步自主避障决策,都在与光速赛跑——这就是为什么行星车必须拥有独立思考的能力。
月面昼夜温差高达 300°C,火星表面辐射为地球的 150 倍。人类无法长期驻留这些环境,机器人将成为建设地外家园的第一批"工人"。
嫦娥七号(2026)、天问三号火星采样返回(2028)、国际月球科研站(2035)——未来十年是行星车技术突破的关键窗口,而你就是这个时代的建设者。
开宇(项目负责人)
kaiyu@mail.ustc.edu.cn
欢迎对行星探测感兴趣的同学邮件咨询